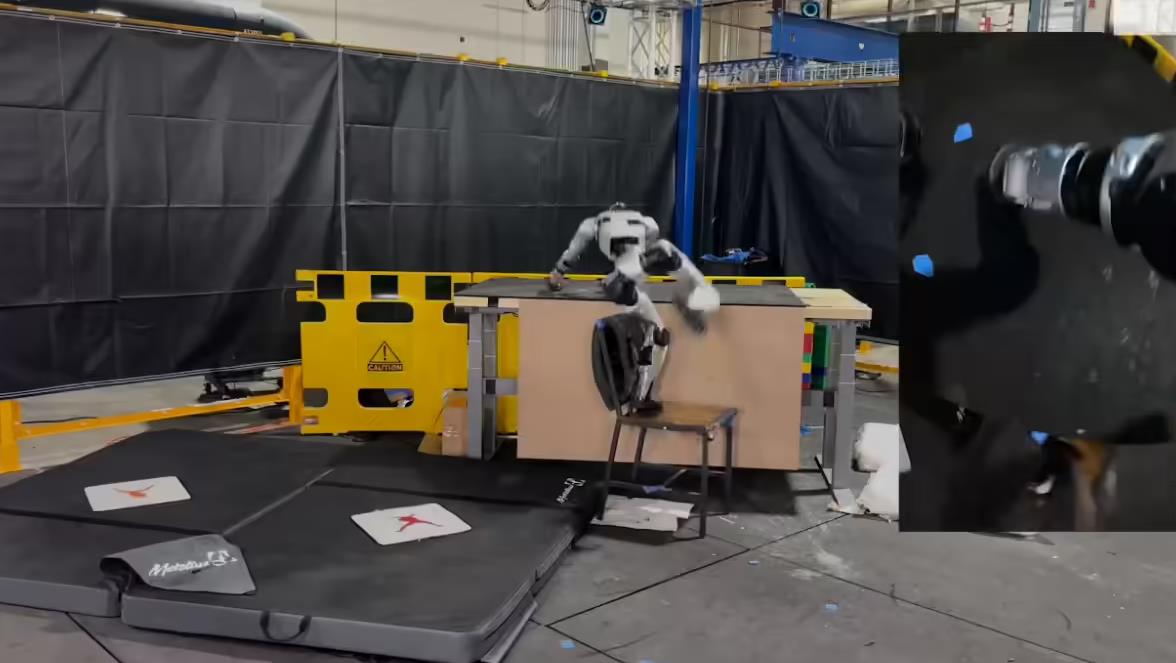
esta semana, equipas de investigação da amazon far labs, do mit, da universidade da califórnia, de berkeley, da universidade de stanford e da universidade carnegie mellon anunciaram o lançamento de uma nova tecnologia revolucionária, o "motor de geração de dados de preservação de interação omniretarget". esta tecnologia permite que o robô humanóide yushu g1 realize sequências de ação complexas unicamente com base na propriocepção, sem depender de sistemas de visão ou lidar. no vídeo de demonstração, o robô não só sobe para cima de uma mesa usando uma cadeira como trampolim, mas também realiza rolamentos de estilo parkour para amortecer o impacto no momento da aterragem, demonstrando as suas impressionantes capacidades motoras.
a inovação central do omniretarget reside na sua tecnologia de malha de interacção, que modela e preserva com precisão as relações espaciais e de contacto entre o robô, o terreno e os objectos com os quais interage. ao satisfazer rigorosamente as restrições cinemáticas e minimizar as diferenças de deformação entre as malhas de movimento humanas e robóticas, o sistema gera trajectórias fisicamente precisas. a equipa de investigação realizou validação em vários conjuntos de dados, gerando dados de trajectória de alta qualidade durante um período de mais de 9 horas. em termos de viabilidade de acção e estabilidade de contacto, o desempenho excede de longe o dos métodos convencionais.
como resultado desta conquista inovadora, o robô pode agora aprender sequências de acção complexas de até 30 segundos de duração com apenas cinco parâmetros de recompensa e uma randomização ambiental simples. para além das acções demonstradas de subida para cima de uma mesa e rolamento, o sistema também pode suportar oito estilos diferentes de manipulação de objectos. a equipa de investigação afirmou que esta estratégia de controlo puramente baseada na propriocepção tem um valor de aplicação significativo em ambientes extremos onde os sensores de visão não funcionam, abrindo caminho para a futura implementação prática de robôs humanóides em cenários como o resgate de desastres e a exploração.